

价格:面议
0
联系人:
电话:
地址:
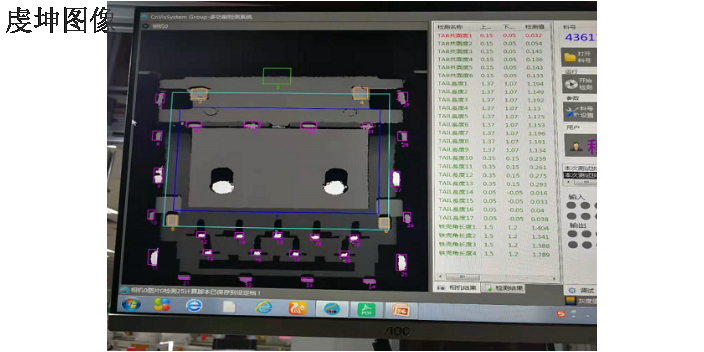
3D相机应用案列:LMI Gocator2520解决方案利用Gocator®2520智能传感器为每个高反光针脚生成高密度的3D扫描数据,用户可以获取最高分辨率的图像。工程师还可以选择使用Gocator®3D快照传感器或传感器组网系统来完全消除遮挡区域,使连接件能被完整地检测到。扫描后,Gocator®通过内置的滤波处理不同类型的数据噪声,宁波点云3D相机参数。借助Gocator2520内置工具,宁波点云3D相机参数,工程师能够扫描并测量出部件距离和共面性,宁波点云3D相机参数。配合自主开发的2D+3D检测软件,成熟的应用于连接器pin针高度检测。3D选型指南,使用指导。宁波点云3D相机参数
3D相机的精度是指什么?跟重复精度有什么区别?线性度的定义?经常听到有人问“.3D相机的精度是指什么?跟重复精度有什么区别?”“3D相机线性度的定义?”等,现在小编带大家一次性搞懂这几个定义!X分辨率=视野宽度/点数●点与点之间沿着激光线方向的水平间距●取决于3D相机沿着视野方向上对应的imager的像素个数对宽度精度很重要Z向线性度以被测输入量处于稳定状态为前提。在规定条件下,3D相机校准曲线与拟合直线间的比较大偏差(ΔZmax)与满量程输出(Z,景深)的百分比,称为线性度。δ=ΔZmax/Z*100%Z分辨率和重复性分辨率:是指3D相机可感受到的被测量值的由此小变化的能力●稳定的测量环境●标准量块●多次重复测量重复性整个视野量程范围内,测同一物体,多次测量值的变动大小另一种说法叫重复精度,注意区别于精度!重复性的目的只是要获知设备的变异性。精度Precision:仪器的值与理论值之间的比较大差值,由.3D激光视觉传感器的基本误差极限和影响量(如温度变化、湿度变化、电源波动、频率改变等)引起的改变量极限确定。精确度,准确(性);数据稳定性线性度Linearity:是描述.3D相机静态特性的一个重要指标,以被测输入量处于稳定状态为前提。在规定条件下。
宁波点云3D相机参数25203D相机采用了紧凑且先进的设计,实现高达10 kHz的检测速度,包括扫描,内置3D测量以满足在线生产速度。
3D相机校准曲线与拟合直线间的比较大偏差(ΔYmax)与满量程输出(Y)的百分比,称为线性度(线性度又称为“非线性误差”),该值越小,表明线性特性越好。以上说到了“拟合直线”的概念,拟合直线是一条通过一定方法绘制出来的直线,求拟合直线的方法有:端基法、由此小二乘法等等。GRR和相关性GRR指“测量系统的重复性和复现性”,英文是GaugeRepeatabilityandReproducibility,反映系统在短期的重复性和长期的稳定性。为计算重复性(Repeatability),在其取得数据时应符合:同一人员;相同的归零条件;同一产品;同一位置;同样的环境条件;数据要在短时间内取得。再现性(Reproducibility)则希望获知不同条件下的变异,因此取得数据时应符合:不同的人员;相同的归零条件;相同的位置;相同的环境;数据宜在较长期间内取得。相关性:两个或多个变量之间的线性关联程度。一般用相关系数来衡量。
Gocator 2300系列:
耐用的3D激光线轮廓传感器Gocator2300传感器可在各种高速,大批量应用中提供强大的3D检测。百万像素成像仪。每个配置文件分辨率1280点视场可达1260mm测量范围高达800mm概要参数型号2320X方向分辨率(mm)0.014Z方向分辨率(mm)0.0018视野(mm)18-26间隙距离(mm)40测量范围(mm)25
3D 视觉引导机器人通常配备真空或气动夹具,允许机器人接触各种材质的零件并有效地运输零件,同时避免碰撞。零件可以系统地或随机地放置在移动的传送带、堆叠箱或托盘上。 3D相机,3D深度相机,3D立体相机。
解决方案Gocator通过对凹凸字符生成高度图来解决这一挑战。它自有的驱动程序GenTL将高度图的数据发送到合适的三方软件来自动识别字符。Gocator支持编码器同步,这允许多个传感器的同步扫描,采集数据。
检测过程使用不同的工业采集方法来进行检测——二维区域的传感器记录条形码;3D视觉传感器用于检测DOT码,二维码和色点。轮胎水平运送期间,传感器上方或下方的两侧都能够检测到,3D视觉相机快速捕捉DOT码。不需要额外处理轮胎,例如转动或旋转轮胎,很好节约了时间。后台软件能够实时在线识别相应的特征并非常快速地做出评估。 3D+AI, LMI Technologies Inc.公司正式并购美国FringeAI。宁波点云3D相机参数
3D相机工作原理和基本参数。宁波点云3D相机参数
彩色相机进行手眼标定的案列,现在我们来看看如何用zivid彩色相机进行手眼标定——手眼标定用于将相机(“眼睛”)看到的内容与机器人手臂(“手”)移动的位置相关联。眼在手上:机器人手眼系统的手眼标定是为了确定安装在机器人上的相机与机器人末端执行器坐标系间的相对位置和方向。通常我们需要将标定物静置在机器人手眼系统的工作空间内,然后控制机器人以不同位姿(位子和姿态)采集一组标定物图像。眼在手外:机器人手眼系统的手眼标定是为了确定安装在机器人外的相机与机器人坐标系间的相对位置和方向。通常,通过将已知形状或图案的标定物放置在机器人的抓手中来完成的。然后在一组不同的位置和方向上拍摄一系列图像。宁波点云3D相机参数
苏州虔坤图像技术有限公司发展规模团队不断壮大,现有一支专业技术团队,各种专业设备齐全。致力于创造高品质的产品与服务,以诚信、敬业、进取为宗旨,以建BASLER(巴斯勒),HIKROBOT(海康),iRAYPLE/华睿大华,AVT,COOLENS(视清),OPT(奥普特),MORITEX(茉丽特),CAN-RILL(灿锐),RICOH(理光),LMI(乐姆迈),computar,QIANKUNIMAGE产品为目标,努力打造成为同行业中具有影响力的企业。公司坚持以客户为中心、苏州虔坤图像技术有限公司成立于2022年06月30日,注册地位于昆山市周市镇伟翰路299号4号房,法定代表人为谭建文。经营范围包括一般项目:技术服务、技术开发、技术咨询、技术交流、技术转让、技术推广;光学仪器制造;机械设备研发;工业自动控制系统装置制造;智能基础制造装备制造;仪器仪表制造;电子测量仪器制造;模具制造;机械零件、零部件加工;光学玻璃制造;通用零部件制造;计算机软硬件及外围设备制造;机械零件、零部件销售;模具销售;电子产品销售;光学仪器销售;机械设备销售;电子元器件批发;工业自动控制系统装置销售;软件销售;软件开发;人工智能基础软件开发;工业机器人制造;仪器仪表销售;计算机软硬件及辅助设备批发(除依法须经批准的项目外,凭营业执照依法自主开展经营活动)市场为导向,重信誉,保质量,想客户之所想,急用户之所急,全力以赴满足客户的一切需要。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造高品质的工业相机,镜头,光源,机器视觉系统集成。





