

价格:8888.00起
0
联系人:
电话:
地址:
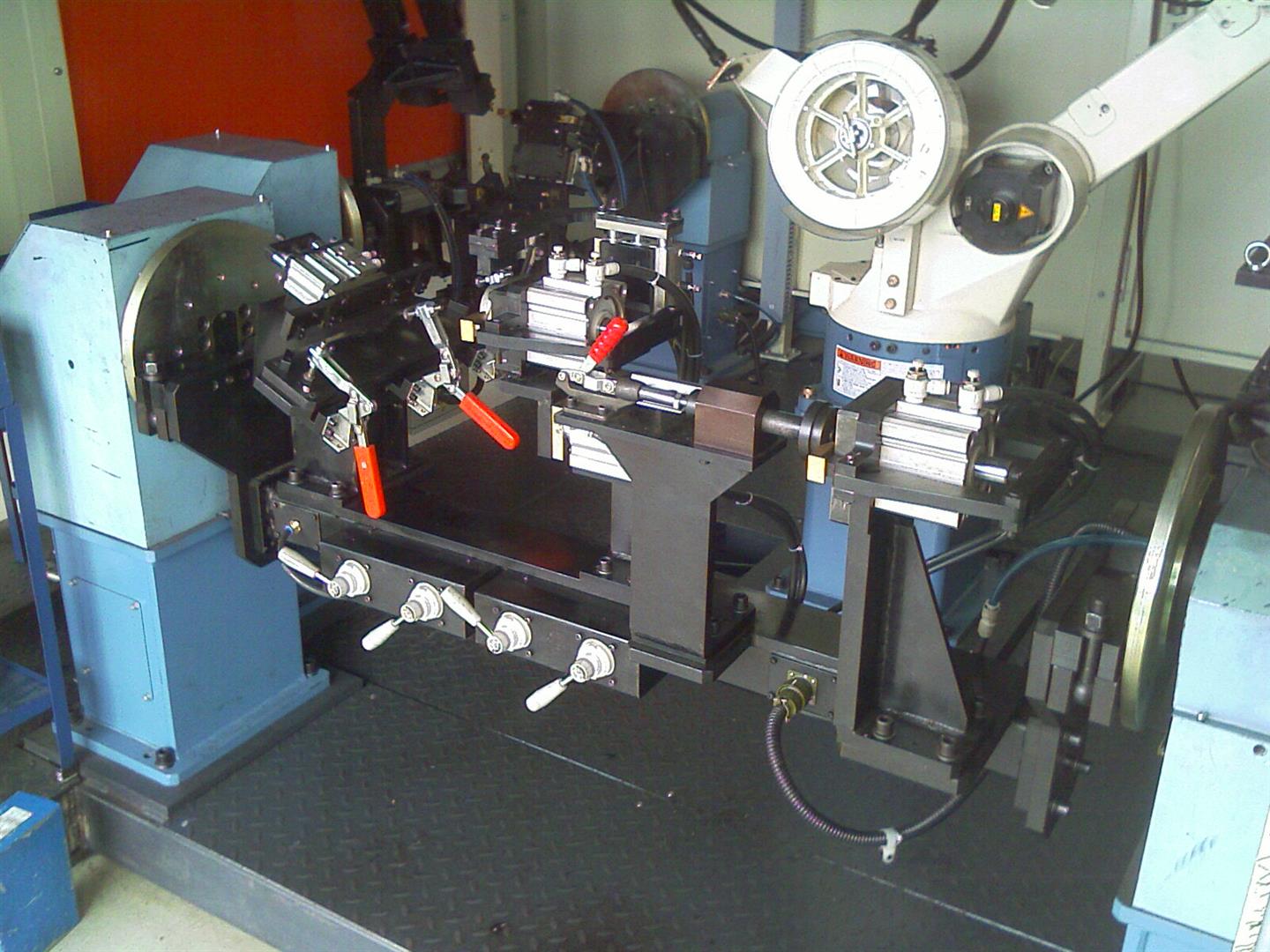
1)D点位控制(PTP)型 机器人受控运动方式为自一个点位目标移向另一个点位目标,只在目标点上完成操作。要求机器人在目标点上有足够的定位精度,相邻目标点间的运动方式之一是各关节驱动机以快的速度趋近终点,各关节视其转角大小不同而到达终点有先有后:另一种运动方式是各关节同时趋近,由于各关节运动时间相同,所以角位移大的运动速度较高·点位控制型机器人主要用于点焊作业。 2)连续轨迹控制(CP)型 机器人各关节同时作受控运动,使机器人终端按预期的轨迹和速度运动,为此各关节控制系统需要实时获取驱动机的角位移和角速度信号。连续控制主要用于弧焊机器人。圆柱坐标型 这类机器人在基座水斗转台上装有立柱,水平臂可沿立柱作上下运动并可在水平方向伸缩。这种结构方案的优点是末端操作器可获得较高速度,缺点是末端操作器外伸离开立柱轴心愈远,其线位移分辨精度愈低。为了适应不同的用途,机器人末尾一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)的,使之能进行焊接,切割或热喷涂。产品介绍弧焊机器人的组成和原理与点焊机器人基本相同,中国在20世纪80年代中期研制出华宇-Ⅰ型弧焊机器人。一般的弧焊机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。性能特点弧焊机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。随着技术的发展,弧焊机器人人正向着智能化的方向发展。





