步进伺服实训平台 北京初级自动化实训设备 系统更智能
价格:面议
BCSH-1型 循环送料系统实训装置
一、循环送料系统实训装置概述:
本实训装置是针对机电一体化实训教学的要求而研发的,它集PLC控制、位置控制、检测、工控组态技术于一体的实训教学装置,通过传感器信号采集、PLC编程、对交流电机、直流电机、送料小车进行较复杂的开关量控制、位置控制及时序逻辑控制,实现小车送料和装料、物料提升的生产流水线运动过程,完成循环送料的功能。适合于机械制造及自动化、机电一体化、自动化、电气工程等的《机电传动与控制》、《运动控制》、《机电一体化技术》、《计算机控制技术》、《检测与转换技术》、《可编程控制技术》等课程开设实训课。
二、循环送料系统实训装置技术参数:
1.输入电源:单相三线~220V±10% 50Hz
2.工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃)海拔<4000m
3.装置容量:<0.5kVA
4.外形尺寸:1050mm×650mm×1500mm
三、系统组成:
1.循环送料系统主体由底板、实训桌(型材结构)、爬坡传送带、物料滑槽、送料小车、小车运行轨道及电气控制等部分组成
2.控制面板:由启停控制开关,各个执行器的控制端均已引出,方便接线
3.开关电源为输入电源220VAC 50Hz,提供直流电源DC24V
4.电气控制由单相交流电机、减速直流电机、开关电源、光电传感器、行程限位开关等器件组成。其中PLC可选用三菱主机为FX1N-24MR 内置开关量I/O(14路开关量输入/10路继电器输出)
四、实训项目:
1.PLC控制交流电机
2.PLC控制直流电机
3.光电传感器的计数控制
4.小车往返控制
5.料盒及小车开关门控制
6.循环送料综合控制
设计:具有机械手失控硬件保护电路,有效防止程序错误或控制失灵时,造成机械故障,机构损坏
多种配备:配备多种传感器, 提高设备工况的信号采集能力。使学生掌握更多类型传感器调试及运用
高速稳定:24次/分钟。连续工作,连续分拣次数34000次/日
一、光机电一体化高速分拣实训系统概述
为了尽快的适应各个领域的发展,能在少的课时内高质量的完成内容多、理论结合实际结合性强、技术涉及面广的机电一体化教学课程。符合各院校的教学实验需求。培养出大量的能熟练掌握及开发运用PLC、变频器、触摸屏、传感器检测、气动执行控制、机械设计装配调试等技术的技术工人、技术员、、输送到各条战线。
我公司经过精心设计推出:BCCL-02型光机电一体化高速分拣实训系统。以下简称:BCCL-02型高速分拣系统(或BCCL-02型)。它实现了生产线的传感检测、传输处理、智能控制、与执行驱动。它涉及到机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等机电一体化的基础知识和基本机电技能要求。
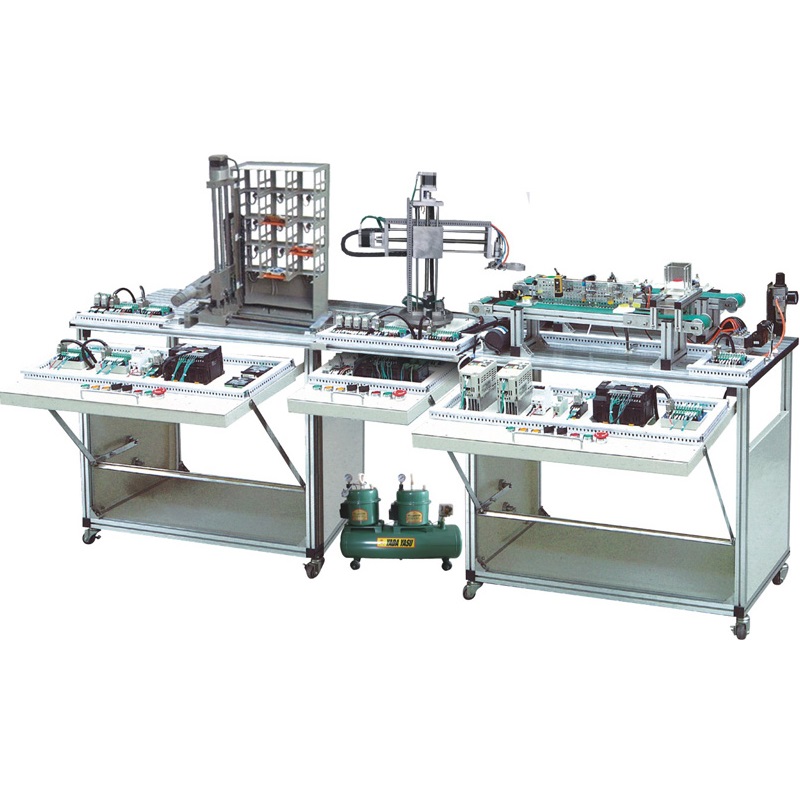
本系统在铝合金导轨式实训台上安装有送料、机械手搬运、材料分拣的三个基本工作机构单元,构成一个典型的自动生产线的机械平台。系统机构采用了气缸驱动、变频器调速驱动、直流电机驱动。系统的控制方式采用了PLC及触摸屏控制等技术。采用模块组合式的结构,各工作单元是相对立的模块,并采用了标准结构和抽屉式模块,具有较强的互换性。并具有一下优点:
光机电一体化高速分拣实训系统
BCCL-02型 光机电一体化高速分拣实训系统
二、光机电一体化高速分拣实训系统特点
A、高速分拣系统机械手机构具有硬件保护功能
我公司推出的BCCL-02型光机电一体化高速分拣实训系统机械手机构具有硬件保护电路。机械手的动作必须按照一定的逻辑程序进行。当学生程序错误或控制失灵时,就会造成机械故障,及损坏机械结构。为此,本系创设计了机械手机构硬件保护电路。它可以对机械手的位置信号及PLC的输出信号进行判断,符合逻辑功能的动作信号则机械手响应动作信号,反之则不动作,从而实现机械配合上的保护。有效的防止事故的发生。从而让学生可以放心编写程序,让老师的教学减少压力。同时增强了整个系统的可靠性。
B、配备有多种类传感器
我公司推出的光机电一体化高速分拣实训系统,配备了多种类型的工业常用传感器,提升了设备机构工作状况的信号数据采集能力,便于学生的编程与整个机构运行的可靠。能让学生更多的了解掌握各种传感器的原理及在实际工作中的运用,用不同的传感器实现相同或者不同的功能。同时,可以通过设备提供更多的技术考核内容(不同的传感器组合在一起就能给学生不同的考核题目),也能准确反映学生的知识的掌握程度。
C、追求的目标:高速与稳定
作为一个自动控制系统追求目标是高速与稳定。否则,将失去任何意义。
通过精心的设计,高精密的生产工艺及反复的改进提升。我公司推出的BCCL-02型光机电一体化高速分拣实训系统,可以实现每日34000次的送料、机械手搬运、分拣物料过程的不间断、无人值守自动工作。这是所有目前其他产品所无法匹敌的。
我们的稳定性指标要求认为:每分钟24次不等于每小时1440次,每小时1440次不等于每日34560次。
D、采用电源容错保护电路
BCCL-02型设计了电源容错保护电路,有效防止电源反接。即使学生操作时电源正负反接,也不会损坏电气元件。让学生能够更大胆的进行实际的操作练习,让老师教学更轻松,同时减少了教学事故发生率,同时减少设备的维护。
综上所述,本系统为学生提供了一个典型的、可进行综合训练的工程环境,为学生构建了一个可充分发挥学生潜能和创造力的实践平台。在此平台上可实现知识的实际应用、技能的综合训练和实践动手能力的客观考核。
BCBJSF-1型 步进伺服控制综合实训平台
一、步进伺服控制综合实训平台概述
PLC步进伺服控制综合实训平台,它集二轴定位模型、PLC、步进运动控制系统、伺服运动控制系统、人机界面、传感器等技术于一体的实训教学装置,适合机电一体化、电气 工程、自动化等实训教学、课程设计、毕业设计。
二、步进伺服控制综合实训平台技术性能
1.输入电源:单相三线~220V±10% 50Hz
2.工作环境:温度-10℃~+40℃相对湿度<85%(25℃) 海拔<4000m
3.装置容量:<1.0kVA
4.整机尺寸:1200mm×800mm×1100mm
三、步进伺服控制综合实训平台组成及功能
1.机构部分:包括实训桌、工业铝型材、网孔板、二轴定位模型(含精密滚珠丝杆、主轴同步机构、检测传感器、限位开关)等组成。
2.PLC 主机:主机 CPU224 DC/DC/DC(内置 14 路数字量输入/10 路数字量输出)+EM253定位模块(2 只)。输出四路高速脉冲,可控制步进机驱动器和伺服电机驱动器。
3.步进系统:ST-29 步进驱动器及 57BYG三相混合式步进电机两套,用于 X、Y 轴驱动。
4.伺服系统:三菱MR-E-20A-KH003伺服驱动器及HF-KE23W1-S100 伺服电机两套,用于主轴同步运行驱动。
5.人机界面:采用 64K 色 7寸彩色工业触摸屏。
6.配二轴定位模型
四、步进伺服控制综合实训平台实训项目
任务一:步进电机及驱动器的使用
1.步进电机及驱动器的选型
2.步进电机及驱动器控制回路的接线
3.步进电机驱动器的设置
4.PLC 控制步进电机的程序编写
5.步进电机运行与调试
任务二:伺服电机及驱动器的使用
1.伺服电机驱动器及伺服电机的选型
2.伺服电机驱动器及伺服电机的接线
3.伺服电机驱动器参数设置
4.通过操作面板控制伺服电机的运行
5.使用伺服软件控制伺服电机的运行
任务三:触摸屏的使用
1.触摸屏的安装
2.触摸屏供电电路连接
3.触摸屏组态界面制作
4.触摸屏与 PLC 通信参数设置
任务四:电气控制电路的安装和 PLC 编程
1.PLC•步进电机驱动器及伺服电机驱动器电气电路连接
2.PLC•步进电机驱动器的二轴定位控制程序编写
3.PLC•伺服电机驱动器的二轴定位控制程序编写
4.基于 PLC 的步进电机二轴定位与伺服电机主轴对位控制程序编写
5.基于伺服位置系统的主轴对位控制程序编写
6.基于触摸屏控制二轴高速同步运转程序编写
任务五:系统调试与运行
BCGYJX-1型 工业机械手实训装置
一、工业机械手实训装置概述
工业机械手实训装置,由铝合金导轨式实训台、机械手装置、控制系统等组成。
该实训装置为坐标式机械手,可完成机械手旋转、手臂垂直上下、手臂水平移动,手爪旋转四个自由度的位置控制。同时配置晶体管式PLC可编程控制器,用于对整个机械手进行复杂地位置控制。该实训装置的控制部分均采用标准式模块设计,可分为电源模块、PLC模块、系统控制模块。包含了机电一体化中所涉及的诸如步进电机驱动、机械传动、气动、可编程控制器、传感器、等多项技术,给学生提供了一个综合实训环境,使学生学过的诸多单科知识在这里得到全面认识、综合训练和相互提升。该实训装置主要用于电气、电工电子、自动化控制、机电一体化岗位技能实训、考核,是各院校相关实训室建设中设备选择之一。
二、工业机械手实训装置技术参数
1、交流电源:三相五线 AC 380 V±10% 50Hz;
2、温度:-10~50℃;环境湿度:≤90%无水珠凝结;
3、外形尺寸:长×宽×高=1200mm×750mm×1400mm;
4、整机功耗:≤1.0 kVA;
5、安全保护措施:实训台桌面采用高绝缘、高强度、耐高温的高密度板。具有接地保护、漏电保护功能,安全性符合相关的国标标准。采用高绝缘的安全型插座及带绝缘护套的高强度安全型实验导线
三、机械手实训台功能特点
1)机械手的横轴和竖轴的机械传动采用高精密的滚珠丝杆,高精密的光杆导轨和直线轴承,配以地机械设计、精密的机械加工及装配,可使机械手臂非常平稳地进行垂直和水平移动和水平方向旋转及位置控制;
2)采用选进的步进电机作为横轴和竖轴的动力源,可实现0.45度的细分,即每转一圈需要800步,滚珠丝行程为4mm,则手臂每步位移精度为0.005mm,步进电机的正常单步角度为0.9,则手臂每步位移精度为0.01mm;
3)机械手臂和机械手爪水平方向旋转采用减速直流电机传动,配置光电传感器及码盘,可实现旋转方向的位置控制;
4)机械手爪采用高精度气动式手爪、配置电磁位置开关及两位三通电磁阀,可实现快速准确地抓取和放开动作;
5)采用晶体管式PLC可编程控制器作为控制主机,配置传感器,可实现PLC指令编程、光电传感器的技术应用;
6)PLC各I/O点和传感器、电机、各电器的连接线都被开放到控制模块的安全插座上,学生可根据PLC程序和各电器的技术要求进行现场接线操作实训,培训学生实际动手接线能力;
7)配套铝钢式机械手台架,竖轴及横轴采用经氧化处理的铝型材,而台架的侧面及底面采用1mm厚度经烤漆处理的钢板,台架与地面之间采用带自锁功能的万向轮,使整个台架不但坚固耐用而且移动方便
8)机械手竖轴和横轴的传动轴为滚珠丝杆, 导程为4mm ;机械手水平旋转角度:270度;
四、实训项目
1.传感器技术使用实训;
2.气动技术应用实训;
3.可编程控制器编程实训;
4.电气控制电路实训;
5.自动控制技术教学与实训;
6.机械系统安装和调试实训;
7.系统维护与故障检测实训。