

价格:面议
0
联系人:
电话:
地址:
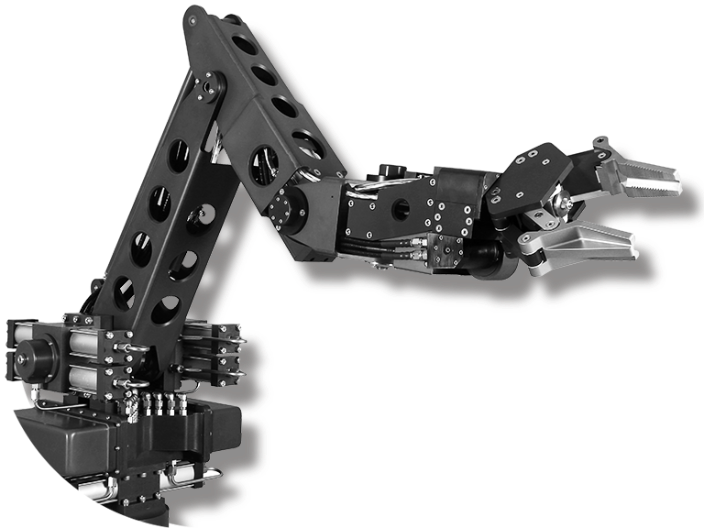
根据主手和从手的构型,可分为主从同构型和主从异构型,浙江电力工业特种作业机器人设计。同构型即主手和从手的结构完全相同,只在尺寸上有所区别。该种方式的控制模式较为简单,主从映射易实现,便于从手末端点位置和姿态的控制;缺点是主手参照从手设计,通用性较差,且操作者很难以舒适的姿势进行长时间操作,不符合人因工程学。主从异构型即主手和从手结构相异,浙江电力工业特种作业机器人设计,主手采用单独设计,浙江电力工业特种作业机器人设计。该种方式的优点是主手设计不受限制,既增加了通用性,又满足了人因工程学相关要求;缺点是控制较为复杂,需要实时求解主从系统的正逆运动学甚至动力学。特种作业机器人可以在高温、低温、辐射强度高等环境中通常无法完成人工作业的任务。浙江电力工业特种作业机器人设计
特种作业液压机械手主要由电动机、控制箱、液压泵及油缸等部件组成,结构简单,安装方便。HS-50L特种作业液压机械手操作简单,易于掌握,适合不同工作环境的需要。避免人工模式的低效性和错误性,提高了可接受性和可靠性,在处理高温、赤热环境,具有很高的可接受性和威力性,可以根据不同业务场景、需求等方面提供定制化服务。在医疗、教育、军方等多个领域都有广阔的应用前景,为人们的生命安全、发展需求、以及安全防护等方面做出重要的贡献。浙江小型特种作业机器人设计特种作业机器人可以定制不同品牌的硬件设备,以便于更合理适合用户。
机器人所处的环境具有复杂性、动态性和不可预测性,另外受计算机技术、控制理论、人工智能和机构等支撑技术开展的限制,要研制出能在非构造化环境下停止完整自主工作的机器人还难以完成。在这种状况下,一个自然的想法是应用一个安装将人的经历智能和机器人的自主功用相分离,将人作爲控制系统中的一个环节参与到机器人的控制中,以完成人感知才能和行爲才能的延伸,力反应数据手套就是这样的安装。因而,力反应安装以及运用力反应安装控制机器人末端执行器是一个重要的研讨范畴。
浙江凯富博科科技有限公司专注研发特种作业主从控制液压机器人,从特种机器人的研究工作上来看,一般会围绕在核环境、海洋工程、太空、军方应用展开特种机器人作业环境危险,所执行的任务通常具有多样性,任务目标的质量、形状和尺寸不尽相同。因此,单单使用单一的末端工具很难满足复杂的任务要求。比较好的解决办法就是为机器人配备末端工具快速更换装置与工具库。使机器人能够根据作业任务实际需要更换末端工具。提高机器人的作业能力与作业效率。特种作业机器人全天候、全天地、全场地稳定运行,以保障高效率、高效能。
特种作业机器人在海洋等特殊环境中作业,特种作业机器人的研发具有相当高的技术含量,具备遥感技术,能够实时监测作业进度,挖掘潜在的问题,在执行任务的同时及时进行态势感知。在处理高难度的特殊施工、空间精确度等工作中,不仅能够提高效率、减少事故,而且结构相对精美、美观,并在成品的执行过程中表现出了强悍的默契力和作业能力,为社会做贡献。特种作业机器人作为未来人工智能技术开发的前沿化研究领域,一定能够在机器人带来便利的同时,让我们的生活更加美好、舒适。特种作业机器人可以进行视频通话,以便于客户及时技术支持。浙江小型特种作业机器人设计
特种作业机器人可以通过人机交互的方式,提高用户体验。浙江电力工业特种作业机器人设计
特种作业机器人的出现,在加强人机协作、提高能进行的难度和效益、优化业务流程等方面都充满了巨大的潜能和冲动。现场使用时,操作人员首先将装置整体放置到合适位置,再将装置整体固定,其次,通过头部智能语音显示器、显示器嵌入框和信号接收发射器座来安装语音显示部件和信号发射接收器件,之后,通过同步传输器、光敏数据采集器和拓展臂连接筒来安装同步传输及光敏数据采集部件,再连接拓展臂,即可进行特种作业机器运行工作。浙江电力工业特种作业机器人设计
浙江凯富博科科技有限公司是我国液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人专业化较早的有限责任公司之一,凯富博科是我国机械及行业设备技术的研究和标准制定的重要参与者和贡献者。凯富博科以液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人为主业,服务于机械及行业设备等领域,为全国客户提供先进液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人。多年来,已经为我国机械及行业设备行业生产、经济等的发展做出了重要贡献。





