


价格:面议
成都嵘兴科技有限公司
联系人:余先生
电话:13551016101
地址:成都市金牛区营福巷168号1栋168号
成都嵘兴科技有限公司生产的【90度铝型材转弯机】
滚筒式输送线:1、滚筒输送线作为高效率、高可靠性、方便组合、结构简单的输送设备广泛应用于各行业的成品,新疆机器人装箱机码垛机、物料输送、分检及在线作业上;通常称作“滚筒线、辊筒线、滚轮线、滚轴线”等等。 2、 滚筒形式:无动力、动力、积放式。动力滚筒线有:链条式、PU带式、摩擦式、“O”形带式、电动式等多种驱动方式;转弯滚筒线有:30°、45°、60°、90°、180°、“S”形转弯滚筒线,新疆机器人装箱机码垛机,及分合流机构、自动移载机等,另有特殊的卷帘式滚筒线。滚筒材料:碳钢镀锌、不锈钢,新疆机器人装箱机码垛机、铝合金、包胶等;分为平面直行、平面压槽、锥形拐弯;动力滚筒一般有:直行单面单链轮(压槽)、单面双链轮(压槽),双面单链轮(压槽);滚筒两端内部采用精密轴承。 成都嵘兴科技装箱、码垛机器人来袭 重庆食品企业将步入全自动化时代?新疆机器人装箱机码垛机
成都嵘兴科技有限公司生产的【 自动称重机】
本机特点1、无动力滚筒、动力滚筒及动力皮带桌面共三种称重桌面选择2、采用德国托利多可靠称重传感器3、大容量的产品存储和异常记录4、多种自动剔除装置可选配5、自动报警+气动剔除6、采用三色声光报警系统7、控制方式:PLC+触摸屏+标准控制按钮+信号开关,分自动/手动控制模式8、可以通过触摸屏找到故障点,轻松排除故障9、本系列产品,可与电脑、喷码机联机使用10、本设备适用于外包装检重11、本机为标准机,低配件随时提供,可根据客户要求定制非标机型 甘肃工业机器人装箱机码垛机云南机器人码垛机,就找成都嵘兴科技!
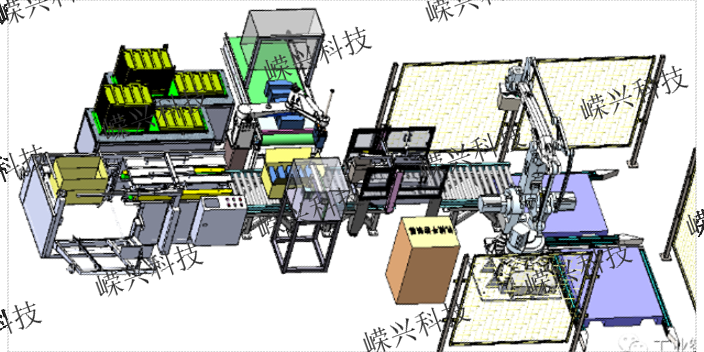
成都嵘兴科技有限公司生产的【低位码垛机】特点:
本机特点:低位码垛,始码模式新颖,高速大能力堆码;改进结构,转位方式先进,优化了小车运行轨迹;采用差动方式加快推包编组和堆码速度;改进托盘输送机运行方式,减少了托盘输送时间;具有低位码垛机的造价低、体积小、检维修方便和高位码垛机高产能的优点;采用了新的制造工艺和技术,使设备的性能和外观质量均达到国外同类产品的水平;控制方式:PLC+触摸屏+标准控制按钮+信号开关,分自动/手动控制模式;可以通过触摸屏找到故障点,轻松排除故障;可根据客户要求非标订做。
成都嵘兴科技有限公司生产的【坐标机器人码垛机】定位系统
机器人定位系统是整台设备的重心,为日本安川公司产品,运动速度快,而重复精度比较高高,X,Y,Z三坐标均选择为同步齿形带传动,单坐标重复定位精度为0.1mm,很快直线运动速度:1000mm/s。其中X坐标轴为单根长度为3000mm,跨度为1935mm的定位系统,由同步传输器保证两根定位系统运动的同步,由一台1500W伺服电机驱动。出于驱动扭矩及惯量的匹配,配有高精度行星齿轮减速机。Y轴选用双定位系统,之所以选者如此大截面的定位单元,主要是因为Y轴为双端支撑,中间悬空结构,如果选择的截面不够,将不能保证机器人运动的平稳性,机器人在高速运动时将发生振颤。两根定位单元并排使用,将Z轴夹在中间,能够很好的平衡负载,这种安装方式具有非常好的稳定性。两根定位系统由一台1000W伺服电机驱动,出于驱动扭矩及惯量的匹配,配有高精度行星齿轮减速机。Z轴定位系统牢固稳定。该产品一般滑块固定而整体作上下运动。该伺服电机因需要将物体快速提升,需要克服很大的重力和加速力,需要较大的功率才可以。实际应用中我们选择了一台2000W带抱闸的伺服电机,配有高精度行星齿轮减速机。A轴为旋转轴。 云南机器人装箱机码垛机,厂家供应,一件也批发!

成都嵘兴科技有限公司生产的【称重剔除机】
一、本机特点1、采用动力皮带传送桌面2、采用德国托利多很好称重传感器3、大容量的产品存储和异常记录4、多种自动剔除装置可选配5、自动报警+气动剔除6、采用三色声光报警系统7、控制方式:PLC+触摸屏+标准控制按钮+信号开关,分自动/手动控制模式8、可以通过触摸屏找到故障点,轻松排除故障9、本系列产品,可与电脑、喷码机联机使用10、适用于外包装检重用11、标准机,低件随时供应12、可根据用户要求非标定做二、技术参数1、型号:ZYJZ-102、检测宽度:370mm3、台面高度:620mm4、很大速度:40米/分5、检测重量:1-10KG6、很高精度:10g7、检测方式:自动报警+气动剔除8、控制检测:于上下取值内OK,于标准值外报警剔9、机械尺寸:(L)1100(W)1700(H)1400mm10、使用电源:220V、1∮、50/60Hz11、机械重量:220kgs 成都嵘兴科技让装箱、码垛机器人解决四川食品工厂痛点!四川机器人装箱机码垛机货源充足
成都嵘兴科技让装箱、码垛机器人解决贵州食品工厂痛点!新疆机器人装箱机码垛机
工业机器人是指由机械手(机械体)、控制器、伺服驱动系统和传感装置等组成,可由人操作、自动控制和重新编程,并能在三维空间完成各种操作的光机电一体化生产设备。特别适用于多品种、多批次的柔性制造系统。首先,工业机器人根据手臂的运动形式分为四种类型:1.矩形臂可以沿三个直角坐标移动;2.圆柱坐标臂可以提升、旋转和伸展;3.球坐标臂可以旋转、俯仰和伸缩;4.铰接臂有多个旋转接头。*二,工业机器人根据执行机构运动的控制功能可分为点式和连续履带式。1.点式*控制执行机构从一点到另一点的精确定位,适用于机床装卸、点焊和一般搬运、装卸作业;2.连续轨道式可控制执行机构按照给定的轨道运动,适用于连续焊接和喷漆作业。3.工业机器人根据程序输入方式可分为编程输入型和教学输入型:1.编程输入类型为通过RS232串口或以太网将计算机上已编程的操作程序文件传输至机器人控制柜。新疆机器人装箱机码垛机
成都嵘兴科技有限公司专注技术创新和产品研发,发展规模团队不断壮大。公司目前拥有专业的技术员工,为员工提供广阔的发展平台与成长空间,为客户提供高质的产品服务,深受员工与客户**。公司以诚信为本,业务领域涵盖全自动给袋式包装机,全自动给袋式真空包装机,灌装机,喷码机,我们本着对客户负责,对员工负责,更是对公司发展负责的态度,争取做到让每位客户满意。公司深耕全自动给袋式包装机,全自动给袋式真空包装机,灌装机,喷码机,正积蓄着更大的能量,向更广阔的空间、更宽泛的领域拓展。