


价格:面议
蓝鲸智能机器人(深圳)有限公司
联系人:杨乐
电话:15914040092
地址:平湖华南城华利嘉电子市场
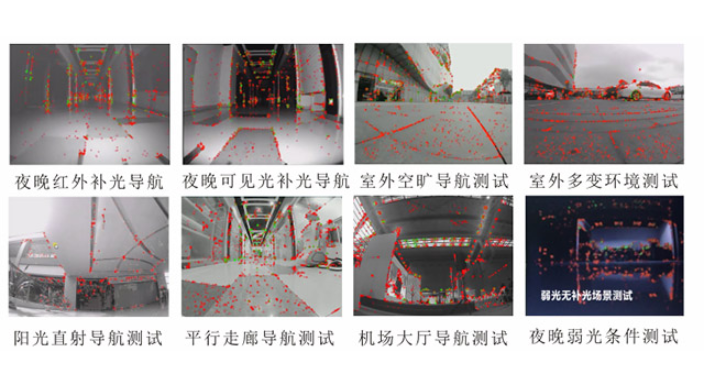
蓝鲸智能机器人的伽利略导航系统,福建视觉机器人平台,只要采用视觉导航,福建视觉机器人平台。所以在夜间光线比较暗的情况下需要补光使用。但是补光的效果需要进行试验测试,蓝鲸团队测试了两种补光方式。一种是红外线补光,一种是可见光补光,都获得了不错的效果。说明视觉导航的光线干扰问题可以解决,这样视觉导航或将成为通用性好,成本优势明显的导航方式.蓝鲸智能机器人的伽利略导航系统,只要采用视觉导航,福建视觉机器人平台。所以在夜间光线比较暗的情况下需要补光使用。但是补光的效果需要进行试验测试,蓝鲸团队测试了两种补光方式。一种是红外线补光,一种是可见光补光,都获得了不错的效果。说明视觉导航的光线干扰问题可以解决,这样视觉导航或将成为通用性好,成本优势明显的导航方式伽利略视觉导航系统HTTP API发布了。福建视觉机器人平台
来自蓝鲸智能的ROS扩展io板是为ROS开发者而生,满足ROS环境下迅速拓展IO使用,在工程项目中,有些场景需要IO输出扩展驱动一些开关、启停、升降、报警、数据采集、触发、探测等功能器件,直接的办法就是通过多路IO输入输出解决,随着ROS系统的普及,开发者更希望直接通过ROS控制IO,快速实现功能,并且保证系统完整性和统一性,可以采用我们专门开发的ROS扩展IO板来实现。可以登录蓝鲸智能机器人(深圳)有限公司官方网站了解详情。广西无轨机器人AMR机器人是一种自动的、位置可控的、具有可编程能力的多功能机械手。
乱码问题主要分为文件名的乱码问题和文件内容的乱码问题。只要文件编辑器有选择编码的功能(比如atom),选择正确的文件编码就可以了。一般如果在linux下打开windows的文件出现乱码,把编码方式设置成GBK或者GB18030就可以了。如果在windows下打开Linux下创建的文件发现有乱码,把编码方式设置成UTF-8就可以了。下面重点说一下文件名乱码的问题。这个要从文件系统说起。文件保存到硬盘上,不仅文件的内容要保存上去,文件的名字,创建时间等等元数据(metadata)也要保存到硬盘上。对于文件名这样的字符串数据,只要保存就会面临着编码的问题。Windows默认的编码方式是GB18030(这个和GBK基本通用)。而Linux的默认编码方式是UTF-8。这就是乱码产生的罪魁祸首。所以其中一个系统创建的文件,在另一个系统看来就是乱码。解决方式很简单,只要把两个系统的编码方式改成一样的就行了。Windows的编码方式是没办法进行修改的。但是Linux的编码方式是可以修改的。具体的设置文件就是/etc/fstab。这个文件设置硬盘分区的挂载方式,里面就包含了编码方式。对于不同格式的文件系统设置的方式也是不一样。更多相关技术问题,可以登录蓝鲸智能机器人(深圳)有限公司官方网站。
蓝鲸智能机器人的小强ROS平台整体为四轮式结构,前面两个主动轮差速控制转弯,后面两个万向轮作为从动轮。这样的结构能够保证其转弯角度的准确性,承重能力也**提升。同时轮子采用不易打滑的橡胶材质再次保证了运动的精细和稳定。电机采用德国进口伺服电机,运动部分由单独控制器进行控制。小强的主控制器为一台i7处理器的mini电脑,包含8G内存和128G固态硬盘。这样的硬件配置保证了小强强大的运算能力。车载电池为12V20AH锂聚合物锂离子电池,经过测试可以保证开发者连续使用七个小时。蓝鲸的小强机器人提供手机遥控app安卓版。

实时显示机器人当前姿态是一件很酷的事情,在ROS中借助rviz可以轻松实现这个目标。先用solidworks 建立小车模型,并下载安装好solidwork转udrf插件。打开udrf插件。两个轮子底盘整个模型需要3个link,3个joint.首先编辑base_link,留意上文中全局坐标系。左右轮设置后开始导出。现在我们已经获到了机器人的udrf文件,生成的整个文件夹是一个ROS包, 修改launch文件夹内的display.launch文件 ,false改true。将这个ros包复制到ROS工作空间中,catkin_make编译后就可以用本文开头的方法测试使用了。为了与周边系统及相应操作进行联系与应答,还应有各种通讯接口和人机通信装置。安徽视觉机器人配送
蓝鲸智能推出一款专门针对机器人的电机控制解决方案。福建视觉机器人平台
自主移动机器人近年来快速发展,其背后基于slam(同步定位与建图)的导航控制系统是自主移动的关键技术。但是现有的导航控制系统大都是使用激光雷达传感器,高性能激光雷达成本高昂,而低成本版本的激光雷达适应性又很差。单目视觉slam技术因为只使用一个普通摄像头,成本有很大优势,同时又能利用图像丰富的3d信息使定位更稳定,动态环境适应性更好。自主移动机器人近年来快速发展,其背后基于slam(同步定位与建图)的导航控制系统是自主移动的关键技术。但是现有的导航控制系统大都是使用激光雷达传感器,高性能激光雷达成本高昂,而低成本版本的激光雷达适应性又很差。单目视觉slam技术因为只使用一个普通摄像头,成本有很大优势,同时又能利用图像丰富的3d信息使定位更稳定,动态环境适应性更好。福建视觉机器人平台
蓝鲸智能机器人(深圳)有限公司坐落在平湖华南城华利嘉电子市场,是一家专业的机器人的技术开发、技术服务;机器人导航系统研发、生产、销售;机器人配套智能模块销售;自动充电;自主导航;机器人调度等技术开发定制、销售;移动机器人平台开发、定制、生产、销售;无轨AGV,无轨AMR开发、定制、生产、销售;公司。一批专业的技术团队,是实现企业战略目标的基础,是企业持续发展的动力。蓝鲸智能机器人(深圳)有限公司主营业务涵盖通用机器人无轨导航系统,机器人SLAM导航方案,ROS自动充电模块,无轨AGV/AMR,坚持“质量保证、良好服务、顾客满意”的质量方针,赢得广大客户的支持和信赖。公司深耕通用机器人无轨导航系统,机器人SLAM导航方案,ROS自动充电模块,无轨AGV/AMR,正积蓄着更大的能量,向更广阔的空间、更宽泛的领域拓展。