首页 > 供应商机 > 安徽单工序冲压机器人制造商 冲床上下料机器人
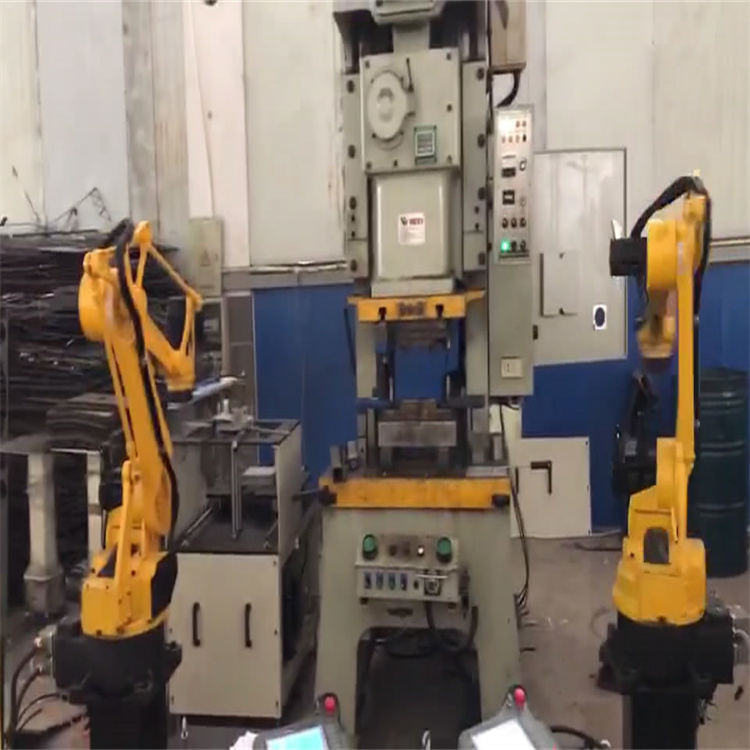
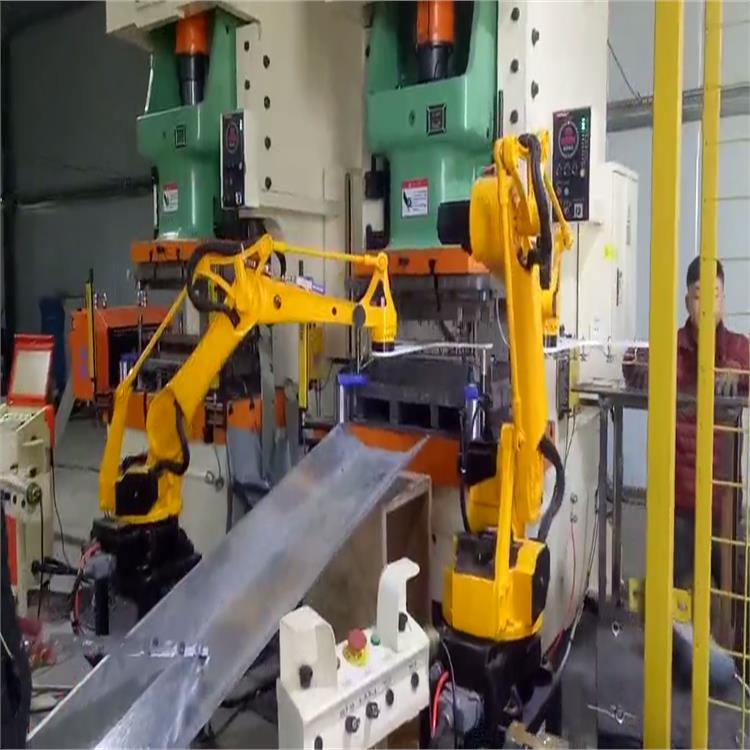
安徽单工序冲压机器人制造商 冲床上下料机器人
价格:28800.00起
东莞市科智达机器人有限公司
联系人:卢经理
电话:13794989064
地址:广东省东莞市塘厦镇平山188工业大道89号
产品规格:
产品数量:
包装说明:
关 键 词:安徽单工序冲压机器人制造商
行 业:机械 工业机器人 喷涂型机器人
发布时间:2022-03-31
注意对冲压机器人进行防湿防锈,夏季或环境湿气较大时,应及时的涂抹矿物油,需要注意佩戴的手套,防止手上的腐蚀性物质或汗液等与其接触后使其锈损坏。
工业冲压机器人能给我们带来什么好处
工业冲压机器人的**措施是确保机器人和工作人员的安全,如何确保快速移动的机器人不会因为过多的力量撞击或是伤害到人,这是至关重要的。当人类远程控制机器人是,他们的机械手可以轻松地完成任务。现在我们可以通过人工手来跟踪和复制人的手指运动。一家国外工厂的工会代表说,由于工业机器人接管了生产线上的一些体力工作,工人们的健康问题已经得到了缓解。在以前,从事这项工作的工人经常患肩颈部问题和腕管综合征。
随着机器人在工业领域得到更广泛的部署,这给社会带来更多的好处。工业机器人可以有效地完成工作,加快整个的生产流程,减少员工的工作时间。想让工业机器人做得越来越,就需要更多的研究来让机器人做到更地融入工作中。

自动冲压机器人的工作空间是怎样的呢
1、通常冲压冲压机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,冲压机器人实际所能达到的工作空间。
2、冲压冲压机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位置不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的限值通常要比其他位置的小些。此外,在可达空间边界上可能存在自由度退化的问题,此时的位置称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度退化现象,这部分工作空间在冲压机器人工作时都不能被利用。
3、除了在工作空间边缘,实际应用中的冲压机械手还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。

冲压机器人的动态特性是怎样的呢
冲压机器人结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
设计时应该尽量减小质量和惯量。对于冲压机器人的刚度,若刚度差,机械手的位置精度和系统固有频率将下降,从而导致系统动态不稳定;但对于某些作业,适当地增加柔顺性是有利的,理想的情况是希望机械手臂杆的刚度可调。增加系统的阻尼对于缩短振荡的衰减时间、提高系统的动态稳定性是有利的。提高系统的固有频率,避开工作频率范围,也有利于提高系统的稳定性。
工业冲压机器人是如何识别物体进行抓取任务的呢
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1、物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2、位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3、相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。
冲压机械手,顾名思义,就要像人手一样即体现个体的灵活,又要能和帮手形成合力,完成冲压线的无人化作业,就是这样的手,才能交出冲压无人化的钥匙。而机器人单臂冲压机械手就是这样的手——轻松抓起、自在放下、随意连接、自由组合。