首页 > 供应商机 > 塑料拖链 扬州定做钢铝拖链单价 泰州钢铝拖链厂家电话
塑料拖链 扬州定做钢铝拖链单价 泰州钢铝拖链厂家电话
价格:100.00起
无锡嘉莱机械有限公司
联系人:郭玉飞
电话:18914127116
地址:上海市嘉定区嘉定工业区嘉松北路
产品规格:
产品数量:
包装说明:
关 键 词:泰州钢铝拖链厂家电话
行 业:五金 机械五金 机床附件
发布时间:2021-08-22
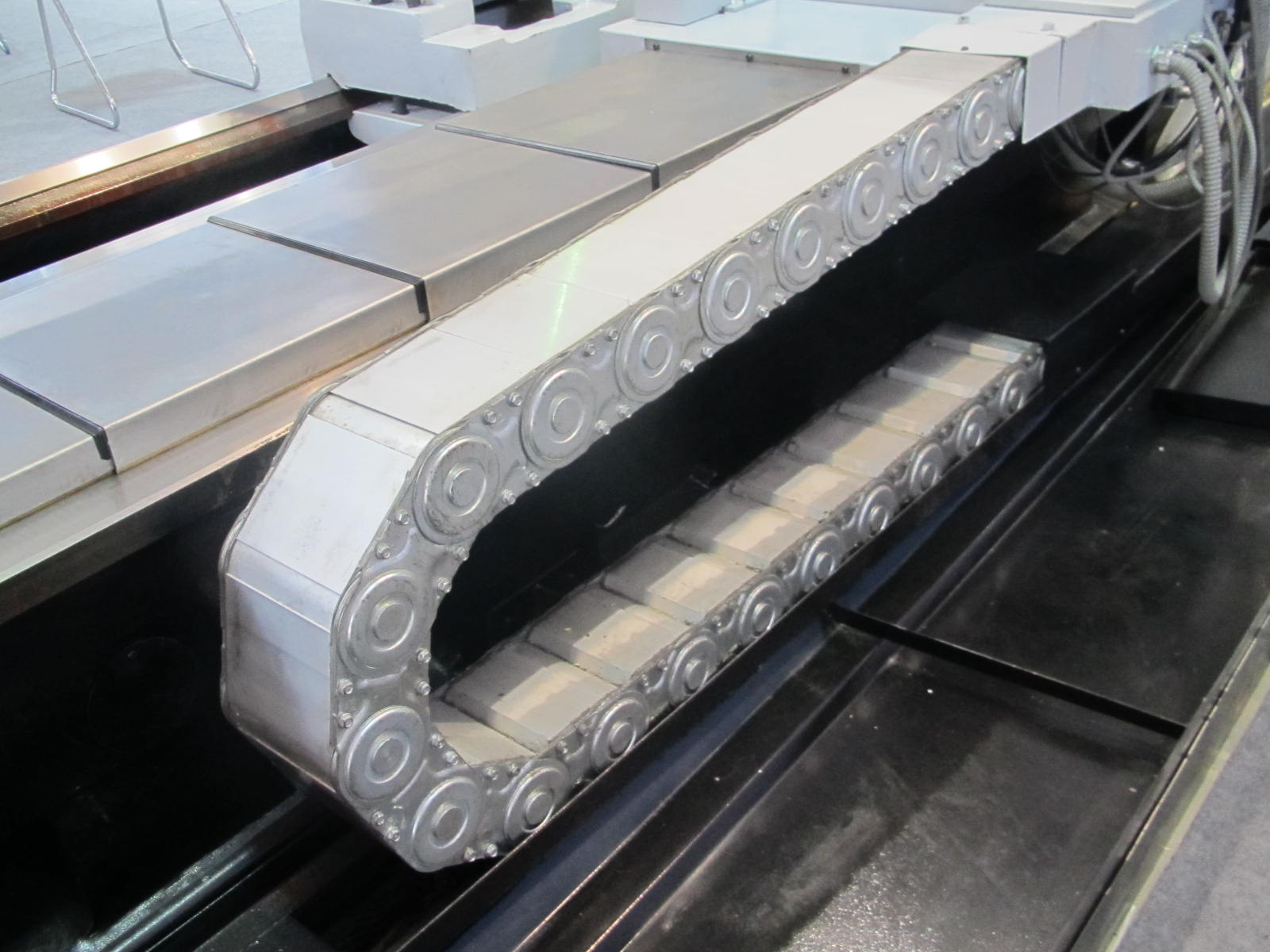
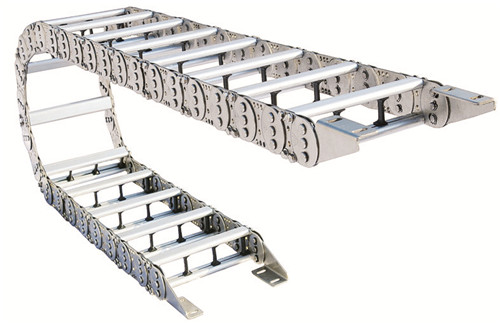
钢铝拖链起源于我们伟大的中国,具体时间应该是解放**年的1948年。由于我们伟大的祖国在进步,经济也在高速发展,但劳动力的缺乏推动了自动化机械设备的快速发展,然而自动化的核心部件就是钢铝拖链,钢铝拖链成为了自动化机械的核心骨,离了它再的设备也是一堆废铁,所以就是因为钢铝拖链的重要性才使得如今的钢铝拖链产品霸具一方,巨大的发展投投资空间让诸多的投资人和企业的目光投向了钢铝拖链的研发和制造当中来。雨后春笋也就指的像钢铝拖链一样仿佛在一夜间遍布开花。
器人外壳,其特征在于,包括具有内腔的塑料外壳以及支撑于所述内腔中且用于安装设备的金属内框架。
要求1所述的机器人外壳,其特征在于,所述塑料外壳包括**部及由所述**部的周缘向下延伸的侧部,所述内腔由所述**部及所述侧部围成。
要求2所述的机器人外壳,其特征在于,所述金属内框架包括**框及由所述**框的周缘向下延伸的侧框边,所述**框抵**于所述**部的内侧,所述侧框边与所述侧部相抵。要求3所述的机器人外壳,其特征在于,所述**部设有沉头孔,所述**框上设有与所述沉头孔相对的螺孔,所述沉头孔和所述螺孔通过沉头螺钉连接。要求4所述的机器人外壳,其特征在于,所述螺孔的侧壁设有与所述螺孔相通的胶槽,所述胶槽中设有用于胶封所述沉头螺钉的密封胶。
要求4所述的机器人外壳,其特征在于,所述沉头螺钉的头部外侧设有用于将所述沉头螺钉覆盖于所述沉头孔中的密封层。如要求3所述的机器人外壳,其特征在于,所述**框与所述侧框边的过渡连接处形成外斜角,所述**部与所述侧部的过渡连接处形成内斜角,所述外斜角与所述内斜角相对设置,所述外斜角与所述内斜角之间存在间隔。
要求3所述的机器人外壳,其特征在于,所述侧部的内侧面上设有定位柱,所述侧框边与所述定位柱相对的位置上设有用于与所述定位柱配合的导向定位孔。要求8所述的机器人外壳,其特征在于,所述定位柱套设有软质垫圈,所述软质垫圈设于所述侧部与所述侧框边之间。如要求3所述的机器人外壳,其特征在于,所述侧部上设有固定孔,所述侧框边上设有与所述固定孔相对的*二固定孔,所述固定孔与所述*二固定孔通过台阶螺丝连接,所述台阶螺丝套设有T型垫圈,所述T型垫圈套设于所述固定孔中。
按照要求3或4所述的多轴机床(2),其特征在于,还设置有作为机械轴的摆动轴(σ),所述摆动轴利用砂轮轴的旋转或其在水平平面(A)上的平行投影对工件和砂轮进行相对摆动。
照要求3至5中任一项所述的多轴机床(2),其特于,通过控制和/或调节装置利用可任意选择的函数或关系实现对相应的机械轴的控制,所述函数或关系还取决于其它参数的值。要求15所述的多轴机床(2),其特征在于,可任意选择的函数是一个多项式函数,所述多项式函数取决于其中的一个虚拟轴的数值和多项式系数。按照要求15所述的多轴机床(2),其特征在于,可任意选择的关系是一圆关系,所述圆关系取决于其中的一个虚拟轴的值和圆的常数,优选取决于圆的半径和一由坐标对给定的中点以及旋转方向。按照要求8至17中任一项所述的多轴机床(2),其特征在于,通过控制和/或调节装置利用可任意选择的关系实现对相应的机械轴的控制,所述关系由坐标表格给定。按照要求18所述的多轴机床(2),其特征在于存取。按照要求1至20中任一项所述的多轴机床(2),其特征在于,在存储**床控制参数的可从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构可实现对作为其它轴的导向轴的虚拟轴的参数化。按照要求21所述的多轴机床(2),其特征在于,在存储**床控制参数的和从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构可实现对作为其它轴的导向轴的任意一个机械装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置生成虚拟轴。按照要求1至23中任一项所述的多轴机床(2),其特征在于,在存储**床控制参数的和从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置对相应的机械轴进行控制。按照要求24所述的多轴机床(2),其特征在于,设置有至少一个预定义的函数或关系类型和所述数据结构具有至少一个用于识别预定义的函数或关系类型的数据区,所述数据区用于对相应的机械轴的函数或关系定义。按照要求25所述的多轴机床(2),其特征在于,用作为参数的多项式系数对多项式函数,优选对六次多项式函数进行预定义。按照要求24或25所述的多轴机床(2),其特征在于,用作为参数的圆半径和一通过坐标对给定的中点以及旋转方向对作为关系类型的圆关系进行预按照要求24至27中任一项所述的多轴机床(2),其特征在于,用作为参数的坐标对作为关系类型的具有坐标的坐标表格进行预定义。按照要求28所述的多轴机床(2),其特征在于,分别采用X坐标、Y坐标和优选从端面观察的法角作为坐标。按照要求24至29中任一项所述的多轴机床(2),其特征在于,机床控制参数存储在存储器内,从控制和/或调节装置对机床控制参数进行存取,在所述存储器内存在数据结构,所述数据结构用于接收通过控制和/或调节装置对相应的机械轴控制加工的工件侧面的标志,优选右或左侧面的标志。按照要求24至30中任一项所述的多轴机床(2),其特征在于,机床控制参数存储在存储器内,从控制和/或调节装置对机床控制参数进行存取,在所述存储器内存在数据结构,所述数据结构将与工件的部分范围相符的至少一组机床控制参数汇集成在一共同的分段标志下的,优选一分段编号下的分段。按照要求31所述的多轴机床(2),其特征在于,总是有这样一组机床控制参数被汇集成分段,其中同一轴作为导向轴被参数化。一种对要求1至32中任一项所述的多轴机床(2)进行控制的方法,其中首先将一虚拟轴作为其它轴的导向轴参数化,和接着在机床对工件进行加工作业时利用虚拟轴实现其它轴定位时的同步。一种用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或者电子载体信号上至少存在一数据结构,所述数据结构具有一数据区,该数据区可实现作为其它轴的导向轴的虚拟轴的参数化,和在按照要求33所述的方法写入或写入后数据载体或者电子载体信号(3)利用所述数据结构对机床(2)进行控制。按照要求34所述的用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或者电子载体信号上至少存在一数据结构,所述数据结构可实现对作为其它轴的导向轴的任意一个机械轴的参数化。按照要求34或35的用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或电子载体信号上至少存在一数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置生成虚拟轴。

特别优选的是,本发明的多轴机床的特征在于,所述工具是砂轮和作为所述机械轴至少设有-砂轮的用χ标示的可定位的径向进给轴,-与径向进给轴水平正交的可定位的用ζ标示的用于对砂轮在砂轮架滑座的移动方向定位的砂轮架滑座,-夹头的可定位的用β标示的对在工件夹具上的工件进行旋转的旋转轴,-可定位的用τ标示的用于利用砂轮轴的旋转或其在垂直平面B上的平行投影对工件和砂轮进行相对摆动的摆动轴,-用于驱动砂轮的旋转轴ω。
也可以用可定位的移动轴δ作为机械轴,用于对砂轮沿砂轮轴的进给位置的控制。
本发明的多轴机床优选具有一个摆动轴σ,所述摆动轴作为机械轴用于利用砂轮轴的旋转或其在水平平面A上的平行投影实现工件和砂轮的相对摆动,此点也可以实现上述讨论的对非旋转对称的工件的制作。
根据对上述实施的替代或附加的实施方式,也可以用γ标示的机械轴利用工件的旋转或其在水平平面A上平行投影实现工件和砂轮的相对摆动。
另外还可以设置移动轴η作为机械轴,所述移动轴用于对工件和砂轮进行相对垂直移动。
特别优选的是由控制和/或调节装置利用可任意选择的函数或关系生成虚拟轴,所述函数或者关系优选取决于时间,和根据本发明的实施方式仅取决于时间。但也可以使虚拟轴不取决于时间,而是取决于其它的(也可以是外部的)事件或数值,诸如机器人等例如外部机器到达的位置。

原则上讲,当然可以放弃这种统一的导向轴并且替代这种导向轴在机床控制参数中给出根据具体情况作为导向轴加以采用的轴。提出这样一种方案可以使机床控制参数实现一定程度的统一。但此点仍不能令人满意,这是因为随后在在更换机床类型情况下,当所述机床不具有选用的导向轴时,不仅产生提出针对导向轴新的机床控制参数的问题,而且由于上述其它轴对导向轴的依赖关系同时还需要为所有其它取决于导向轴的轴生成新的机床控制参数。如果与此相反,不存在作为导向轴的另外一个轴,则可以尝试以如下方式在工件上实现其定位结果,即对另外的在新的机床类型上存在的其它轴通过机床控制参数进行相应控制,其中其余的轴的相应的机床控制参数保持不变。
这样可以用利用工件在水平向上的旋转实现工件和工具的相对摆动的摆动轴取代利用工具轴在垂直向上的旋转实现工件和工具相对摆动的不存在的可定位的摆动轴,同时并不涉及夹头的用于对在工件夹具上的工件进行旋转的径向进给轴或可定位的旋转轴的机床控制参数。
然而对此的前提是,为所有加以考虑的机床类型的总体控制方案必须可以提出一个统一的导向轴。此点在成形磨床上是行不通的,这是因为如上所述,与根据滚切方法工作的机床不同,不存在原则上一直必要的可以作为导向移动的滚切移动。
因此,本发明的目的在于提出一种用于制造具有螺旋壳面的工件的机床的计算机控制系统,其中可以实现对具有不同的可控轴的不同的机床类型的相应的机床控制参数的应用,从而在更换有待控制的机床时(在几何尺寸允许范围内)新形成的用于对轴进行控制的机床控制参数影尽可能少。
在相同的高度下,轻型槽钢比普通槽钢的腿窄、腰薄、重量轻。18 -40 号为大型槽钢,5 -16 号槽钢为中型槽钢。进口槽钢标明实际规格尺寸及相关标准。槽钢的进出口定货一般是在确定相应的碳结钢(或低合金钢)钢号后,以使用中所要求的规格为主。除了规格号以外,槽钢没有特定的成分和性能系列。
槽钢的交货长度分定尺、倍尺二种,并在相应的标准中规定允差值。国产槽钢的长度选择范围根据规格号不同分为5 -12m 、5 -19m 、6 -19m 三种。进口槽钢的长度选择范围一般为6 -15m 。
某钢厂中400机组是以生产中号角钢和槽钢为主的型材机组,年产量65万吨,其中槽钢产品规格为638~1208,产量约占总产量的25%。成品槽钢的分段作业采用1台400t冷剪机进行。槽钢剪切质量对后续工艺,特别是焊接质量影响较大,若剪切断口处存在塌肩、毛刺、撕裂、切斜等缺陷,则会使槽钢对接时存在较大缝隙,影响焊接质量,特别是强度指标,从而造成较大的安全隐患。
安钢垂400机组随生产节奏和产量的提高,上述剪切缺陷越来越**,剪切质量内控达标率仅为94.2%。而且剪刃的使用寿命越来越短,平均每班更换一次,造成生产成本和职工劳动强度增加。针对这些问题,从工艺、技术和操作上进行了认真分析,并提出了相应改进措施,取得了较好效果。