首页 > 供应商机 > 无锡钢铝拖链定制 苏州定做钢铝拖链推荐 机床拖链
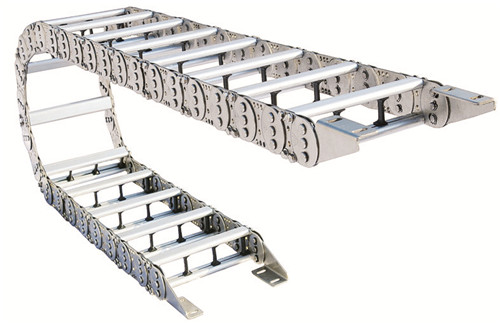
无锡钢铝拖链定制 苏州定做钢铝拖链推荐 机床拖链
价格:100.00起
无锡嘉莱机械有限公司
联系人:郭玉飞
电话:18914127116
地址:上海市嘉定区嘉定工业区嘉松北路
产品规格:
产品数量:
包装说明:
关 键 词:无锡钢铝拖链定制
行 业:五金 机械五金 机床附件
发布时间:2021-06-06
拖链电缆是一种可以跟随拖链进行来回移动而不易磨损的高柔性电缆便叫拖链电缆,通常也可称之拖曳电缆,坦克链电缆。
在设备单元需要来回移动的场合,为了防止电缆纠缠、磨损、拉脱、挂和散乱,常把电缆放入电缆拖链中,对电缆形成保护,并且电缆还能随拖链实现来回移动
1.抗拉中心
在电缆的中心根据芯数数量以及每根芯线交叉区域的空间里尽可能的有一个真正的中心线填充(而不是像通常情况下,用一些填充料或废塑料制成的垃圾芯线填充)这种方法能有效的保护绞线结构,防止绞线游离到电缆的中心区域。
2.导体结构
电缆应该选择柔韧性的导体,一般来说导体越细,电缆的柔韧性越好,但导体过细,会产生电缆缠绕现象。一系列长期的实验提供了单根导线的直径,长度和节向的屏蔽组合,它有的抗拉能力。
3.芯线绝缘
电缆内的绝缘材料不能彼此粘滞。而且绝缘层还需要支撑每股单股的导线。因此只有在高压成型的PVC或者TPE材料才能用于拖链的数百万米电缆中的应用过程中证实他的可靠性。
4.绞线
绞线结构必须以的交合节距绕在一个稳定的抗拉中心周围。然而由于绝缘材料的应用,绞线结构应按运动状态设计,从12根芯线开始,因该采用成束绞合的方式。
5.内护套
甲胄式挤压成型的内护代廉价的羊毛材料,填充物或附属填充物。这一方法能保证绞线结构不会散乱。
6.屏蔽
用优化的编织角度将屏蔽层紧紧的编织在内护套外,松散的编织带会降低EMC的保护能力并且屏蔽层也很快因屏蔽的断裂而失效。紧密编织的屏蔽层同时具有抗扭力的作用。
7.外护套
由不同的改良材料制成的外护套具有不同的功能,有抗UV功能的,有抗低温功能的,有耐油的以及成本优化的。但所有的这些外护套都有一个共同点,高耐磨性,并不会粘附任何东西。外护套必须是高柔性的但也要有支撑功能,当然应该是高压成型的
本发明涉及一种机床的具有计算机系统、计算机程序和计算机程序产品,以及配合的机床的中性数据(Neutraldaten)-计算机控制系统。
目前制造机床时,面临越来越多的相互交织的生产过程,所述生产过程的标准化在工业界是首先加以考虑的问题,同时还要将用于控制机床必要的计算机系统一并在该生产过程加以考虑。其中的一个目的在于实现技术上可行的统一的机床控制系统,所述机床控制系统可以使使用者在对具体的机床类型进行更换时或甚至在更新数据库和存储数据时为根据工件程序加工产品提供尽可能高的机床控制参数的一致性。
一段时间以来已经针对不同的机床类型不断地探索这种措施,其中在此特别对锥齿轮切齿机给予了很大的重视。
在此,对于锥齿轮切齿机目前的解决方案是,整个机床系列的机床控制参数被汇集在一个具有所有的在机床系列中有关的有待控制的轴的统一的数据模型中,所述数据模型然后根据相应的实际的机床的具体情况-在可行的情况下,即用机床控制参数控制的轴实际存在的情况下-生成。
近年来,机器人得到了大规模的应用。在机器人的研发和使用过程中,由于机器人部件不能在外,因此,通常机器人会设置外壳。
现有的机器人外壳通常有四种,有钣金外壳、金属外壳、玻璃钢外壳及塑料外壳,但其仍然存在这样的问题:采用钣金外壳时,其外壳的加工误差较大,无法进行复杂的曲面造型,满足不了各种外观曲面的需求,且在满足高强度力学条件的情况下,其重量、体积较大;采用金属外壳时,其外壳的曲面成型麻烦,结构复杂,成本高,虽然能够满足高强度的使用要求,但金属材料密度较大,增加了机器人外壳的整体质量;而采用玻璃钢外壳或塑料外壳,尽管相对于金属外壳,其整体质量较小,但却不能够承受高强度的力学条件,容易发生变形破损,影响整机性能,严重时使机器人无常工作。

按照要求3或4所述的多轴机床(2),其特征在于,还设置有作为机械轴的摆动轴(σ),所述摆动轴利用砂轮轴的旋转或其在水平平面(A)上的平行投影对工件和砂轮进行相对摆动。
照要求3至5中任一项所述的多轴机床(2),其特于,通过控制和/或调节装置利用可任意选择的函数或关系实现对相应的机械轴的控制,所述函数或关系还取决于其它参数的值。要求15所述的多轴机床(2),其特征在于,可任意选择的函数是一个多项式函数,所述多项式函数取决于其中的一个虚拟轴的数值和多项式系数。按照要求15所述的多轴机床(2),其特征在于,可任意选择的关系是一圆关系,所述圆关系取决于其中的一个虚拟轴的值和圆的常数,优选取决于圆的半径和一由坐标对给定的中点以及旋转方向。按照要求8至17中任一项所述的多轴机床(2),其特征在于,通过控制和/或调节装置利用可任意选择的关系实现对相应的机械轴的控制,所述关系由坐标表格给定。按照要求18所述的多轴机床(2),其特征在于存取。按照要求1至20中任一项所述的多轴机床(2),其特征在于,在存储**床控制参数的可从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构可实现对作为其它轴的导向轴的虚拟轴的参数化。按照要求21所述的多轴机床(2),其特征在于,在存储**床控制参数的和从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构可实现对作为其它轴的导向轴的任意一个机械装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置生成虚拟轴。按照要求1至23中任一项所述的多轴机床(2),其特征在于,在存储**床控制参数的和从控制和/或调节装置对所述机床控制参数进行存取的存储器中存在数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置对相应的机械轴进行控制。按照要求24所述的多轴机床(2),其特征在于,设置有至少一个预定义的函数或关系类型和所述数据结构具有至少一个用于识别预定义的函数或关系类型的数据区,所述数据区用于对相应的机械轴的函数或关系定义。按照要求25所述的多轴机床(2),其特征在于,用作为参数的多项式系数对多项式函数,优选对六次多项式函数进行预定义。按照要求24或25所述的多轴机床(2),其特征在于,用作为参数的圆半径和一通过坐标对给定的中点以及旋转方向对作为关系类型的圆关系进行预按照要求24至27中任一项所述的多轴机床(2),其特征在于,用作为参数的坐标对作为关系类型的具有坐标的坐标表格进行预定义。按照要求28所述的多轴机床(2),其特征在于,分别采用X坐标、Y坐标和优选从端面观察的法角作为坐标。按照要求24至29中任一项所述的多轴机床(2),其特征在于,机床控制参数存储在存储器内,从控制和/或调节装置对机床控制参数进行存取,在所述存储器内存在数据结构,所述数据结构用于接收通过控制和/或调节装置对相应的机械轴控制加工的工件侧面的标志,优选右或左侧面的标志。按照要求24至30中任一项所述的多轴机床(2),其特征在于,机床控制参数存储在存储器内,从控制和/或调节装置对机床控制参数进行存取,在所述存储器内存在数据结构,所述数据结构将与工件的部分范围相符的至少一组机床控制参数汇集成在一共同的分段标志下的,优选一分段编号下的分段。按照要求31所述的多轴机床(2),其特征在于,总是有这样一组机床控制参数被汇集成分段,其中同一轴作为导向轴被参数化。一种对要求1至32中任一项所述的多轴机床(2)进行控制的方法,其中首先将一虚拟轴作为其它轴的导向轴参数化,和接着在机床对工件进行加工作业时利用虚拟轴实现其它轴定位时的同步。一种用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或者电子载体信号上至少存在一数据结构,所述数据结构具有一数据区,该数据区可实现作为其它轴的导向轴的虚拟轴的参数化,和在按照要求33所述的方法写入或写入后数据载体或者电子载体信号(3)利用所述数据结构对机床(2)进行控制。按照要求34所述的用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或者电子载体信号上至少存在一数据结构,所述数据结构可实现对作为其它轴的导向轴的任意一个机械轴的参数化。按照要求34或35的用于写入按照要求1至32所述的多轴机床(2)内的具**床控制参数的数据载体或电子载体信号(3),其特征在于,在所述数据载体或电子载体信号上至少存在一数据结构,所述数据结构用于接收函数或关系定义,所述函数或关系定义用于通过控制和/或调节装置生成虚拟轴。

本实用新型的目的在于提供机器人外壳,旨在解决现**器人外壳所存在的加工误差大、曲面造型复杂、重量大、体积大和不满足高强度力学条件的问题。
为解决上述技术问题,本实用新型提供了机器人外壳,包括具有内腔的塑料外壳以及支撑于所述内腔中且用于安装设备的金于塑料外壳的内腔中,再将设备安装于金属内框架上,这样,金属内框架将对设备形成较高的支撑强度,而塑料外壳又便于进行复杂的曲面造型。相比较现有采用钣金外壳而言,其塑料外壳的加工误差小,便于进行复杂的曲面造型,满足各种外观曲面的需求,并且,在满足高强度力学条件的情况下,其重量较小;相比较现有采用金属外壳而言,其塑料外壳的曲面成型简单,个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。还需要说明的是,本实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。支撑强度,而塑料外壳11又便于进行复杂的曲面造型。相比较现有采用钣金外壳而言,其塑料外壳11的加工误差小,便于进行复杂的曲面造你型,满足各种外观曲面的需求,并且,在满足高强度力学条件的情况下,其重量较小;相比较现有采用金属外壳而言,其塑料外壳11的曲面成型简单,成本低,在金属内框架12满足高强度的使用要求的情况下,但金属材料的使用少,机器人外壳10的整体质量小;而相比较现有采用玻璃钢外壳或塑料外壳11而言,其在保证机器人外壳10整体质量较小的情况,金属内框架12能够承受较高强度的力学条件,不易发生变形破损,机器人能够较好地正常工作。
关于塑料外壳11具体结构的优选实施方式,如图3所示,塑料外壳11包括**部111及由**部111的周缘向下延伸的侧部112,内腔由**部111及侧部112围成。这样,使得内腔具有较大的安装空间,其先将金属内框架12支撑于内腔中,再将设备安装于金属内框架12上,能够提高机器人外壳10的整体空间利用率。
如图3所示,为了使得金属内框架12更好地与塑料外壳11的内腔相适,以充分利用内腔的安装空间,金属内框架12包括**框121及由**框121的周缘向下延伸的侧框边122,**框121抵**于**部111的内侧,侧框边122与侧部112相抵接。
具体地,为了便于安装设备,**框121上设有用于安装设备的安装孔。当然,金属内框架12可单承载设备。
如所示,为了使得金属内框架12与塑料外壳11的装配稳固,**部111设有沉头孔113,**框121上设有与沉头孔113相对的螺孔123,沉头孔113和螺孔123通过沉头螺钉13连接。细化地,,为了保证沉头孔113与螺孔123的连接稳固,螺孔123的侧壁设有与螺孔123相通的胶槽胶槽中设有用于胶封沉头螺钉13的密封胶14。这样,沉头螺钉13将稳稳地将金属内框架12和塑料外壳11连接,而不易从沉头孔113和螺孔123中脱落。密封胶14为密封胶14。,为了进一步地保证沉头螺钉13稳固连接金属内框架12和塑料外壳11,沉头螺钉13的头部外侧设有用于将沉头螺钉13覆盖于沉头孔113中的密封层。该密封层可为腻子膏或密封胶14。此外,密封层的外表面可经过打磨,使得密封层的外表面与**部111的外表面平齐,由于材料的热胀冷缩属性,即塑料外壳11与金属内框架12的膨胀系数不同,因此,为了避免在曲面造型过程中,材料的热胀冷缩属性对机器人外壳10的整体造型造成影响,**框121与侧边框的过渡连接处形成外斜角126,**部111与侧部112的过渡连接处形成内斜角117,外斜角126与内斜角117相对设置,外斜角126与内斜角117之间存在间隔。这样,由于间隔的存在,使得塑料外壳11的内斜角117和金属内框架12的外斜角126能够于间隔中自由伸缩,保证了**框121外斜角126和**部111内斜角117的支撑强度,从而保证了机器人外壳10转角处的支撑强度。此外,该间隔可根据塑料及金属材料各自膨胀系数及使用温度计算得出。
如为了保证金属内框架12与塑料外壳11于侧面的连接稳定性,侧部112的内侧面上设有定位柱114,侧框边122与定位柱114相对的位置上设有用于与定位柱114配合的导向定位孔124。这样,通过定位柱114与导向定位孔124的定位配合,金属内框架12与塑料外壳11的侧面连接强度得到了提高。,为了进一步地提高金属内框架12与塑料外壳11的侧面连接强度,定位柱114套设有软质垫圈115,软质垫圈115设于侧部保证金属内框架12与塑料外壳11之间不存在相对移动或晃动。
以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
在相同的高度下,轻型槽钢比普通槽钢的腿窄、腰薄、重量轻。18 -40 号为大型槽钢,5 -16 号槽钢为中型槽钢。进口槽钢标明实际规格尺寸及相关标准。槽钢的进出口定货一般是在确定相应的碳结钢(或低合金钢)钢号后,以使用中所要求的规格为主。除了规格号以外,槽钢没有特定的成分和性能系列。
槽钢的交货长度分定尺、倍尺二种,并在相应的标准中规定允差值。国产槽钢的长度选择范围根据规格号不同分为5 -12m 、5 -19m 、6 -19m 三种。进口槽钢的长度选择范围一般为6 -15m 。
某钢厂中400机组是以生产中号角钢和槽钢为主的型材机组,年产量65万吨,其中槽钢产品规格为638~1208,产量约占总产量的25%。成品槽钢的分段作业采用1台400t冷剪机进行。槽钢剪切质量对后续工艺,特别是焊接质量影响较大,若剪切断口处存在塌肩、毛刺、撕裂、切斜等缺陷,则会使槽钢对接时存在较大缝隙,影响焊接质量,特别是强度指标,从而造成较大的安全隐患。
安钢垂400机组随生产节奏和产量的提高,上述剪切缺陷越来越**,剪切质量内控达标率仅为94.2%。而且剪刃的使用寿命越来越短,平均每班更换一次,造成生产成本和职工劳动强度增加。针对这些问题,从工艺、技术和操作上进行了认真分析,并提出了相应改进措施,取得了较好效果。


