

价格:面议
浙江勃展工业自动化设备有限公司
联系人:邹小花
电话:13616661328
地址:浙江省温州市瓯海区仙岩街道宝成路14号
桁架机器人的四大优越性:提升工作效率和性能领域首先,在技术上分析,桁架机械手在提高工作效率和性能领域有着无可比拟的优越性。桁架机器人附加值多与此同时,从性能、工作效率、管理方法等领域开展了一个系列的增值改善,机器人也有许多优越性。*二个要素是生产成本。现阶段,人工生产成本十分昂贵。开放30多年来,我国人工素质不断提升,人工生产成本也在不断上升。这也是我国的不断进步。然而,历经十几年的发展,我国的机器人价格已经降低了50%以上。与两者相比,过去的十年里,人工生产成本提高了几倍,而机器人的使用生产成本却在降低。从投资角度来分析,后者也拥有了运用的条件。解决劳动力紧缺难题从可行性来讲,机器人自动化技术的不断发展和价位的大幅度降低,促使机器人的批量生产运用成为了可能。与此同时,人工紧缺和人工成本增加加快了这一进程。降低生产成本人工成本的提升、社会**、工伤事故频发等,增加了企业的生产成本。但是,对于桁架机器人,这些都*考虑,这较大降低了生产成本。桁架机器人,就选浙江勃展工业自动化设备有限公司,有想法的可以来电咨询!福建自动化机器人供应厂
工业机器人工业机器人是一种能自动控制、可重复编程、多功能、多自由度的操作机,用于搬运材料、工件或操持工具,完成各种作业。它可以是固定式或移动式。工业机器人的控制功能和结构特点以及自治能力各有差异,但必须具备三个基本要求:采用以CPU为的控制器进行控制,如工业控制计算机、NC控制器、PLC等;能按输人指令进行记忆和再现;能地按给定指令在三维空间内进行操作。工业机器人的应用非常,制造业和非制造业各领域都可以采用。目前常用的工业机器人有喷涂机器人、点焊机器人、弧焊机器人、搬运机器人、装配机器人、冲压及压铸上下料机器人等,还有在特殊作业环境下采用的机器人。本篇所述的机器人一般意指工业机器人。工业机器人的构成一台工业机器人一般由机器人本体、控制装置和驱动单元三部分构成。湖北工业机器人供应厂浙江勃展工业自动化设备有限公司是一家专业非标机器人的公司,有想法的不要**哦!

机器人可以提高整个生产过程的自动化程度机械手的使用,有助于实现材料的传送、工件的装卸、加工刀具的更换以及设备零件的装配等的自动化程度,从而可以提高劳动生产效率和降低生产成本。改善工作环境、避免安全隐患在高温、高压、低温、低压、有灰尘、噪声、臭味、放射性物质或有其它有毒污染以及操作空间狭窄等场合中,用人手直接拿取工件是存在一定危险或不可能做到的。而应用机械手即可部分或全部代替人安全有效的的完成作业。
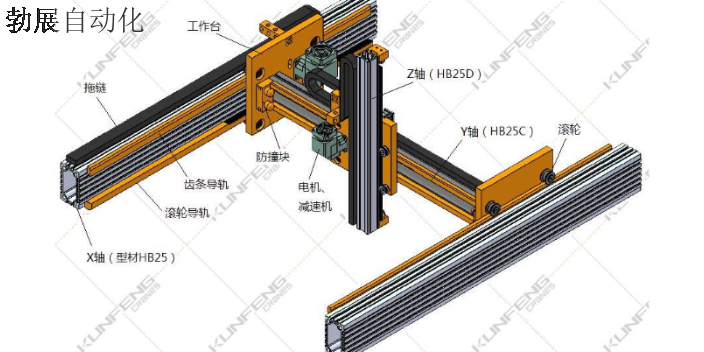
桁架机器人机械手组成分析?桁架机器人机械手组成分析:桁架机器人的手部装置又称末端执行器。根据作业性质不同,机械臂末端的执行器有不同形式。桁架机器人手臂和手腕是桁架机器人操作机中的基本部件,它由旋转运动和往复运动的机构组成。其结构形式是多种多样的,但多数桁架机器人的手臂和手腕是由关节和杆件构成的空间机构,一般由3-10个自由度组成,工业全自动桁架机器人一般为3-6个自由度。由于桁架机器人具有多自由度手臂、手腕的机构,使操作运动具有通用性和灵活性,这也是区别于一般自动机的特点。浙江勃展工业自动化设备有限公司是一家专业机床机器人的公司,有想法的可以来电咨询!
工业机器人控制系统供应商信息:成都卡诺普自动化控制技术有限公司系统简介·CRP-S80-RTEX工业机器人控制系统采用国际流行的开放式软硬件平台。配以100MRTEX以太网总线、数据采集卡及机器人端子和安全接口;模块化的软件设计,针对不同的本体结构、应用行业、功能等。可实现垂直多关节串联机器人、垂直多关节平行四边形机器人、垂直多关节L形手腕机器人、垂直多关节球形手腕机器人、较坐标机器人、多轴机械等多类机器人的控制;应用在搬运、焊接、喷涂、码垛、切割、抛光打磨等领域。标准的计算机总线可扩展现场总线、机器视觉系统等。技术特点·优化结构算法,适应多种结构形式的本体控制·模块化功能设置,适应多种应用场合·16轴控制,可实现双机协同及外部轴接口·RTEX以太网总线,100M速度,u级同步精度·开放式结构,同步国际水平,方便功能扩展·系统集成24入24出I/O、4路D/A、编码器接口·软件PLC功能,方便逻辑控制·工艺功能,简化编程操作简便·适配Panasonic伺服·安全模块。上海换热器厂家推荐。湖南数控机器人供应厂
浙江勃展工业自动化设备有限公司为您提供 数控机器人。福建自动化机器人供应厂
机械手置物点怎么设置:行程限位设定在机械手初次运转的场合或者机械手横走距离变更(原点接近开关、越限接近开关、取物区域接近开关、置物区域接近开关及接近开关挡板的位置调节)或者系统参数复位时,必须确认横走行程限位以及比较大值较小值的设置是否正确。系统中与机械手横走行程有关的设置值有三个:大软件行程:机械手横走的较大行程;这个设置值必须要在从原点接近开关到模内限位开关的距离之内。取物点位置:机械手在模内下行取物的位置;这个设置值必须在置物区域接近开关的工作范围之内。中置点位置:机械手在模外置物区域的比较大值:这个设置值必须要在置物区域接近开关的工作范围之内。设置好中置点位置后,机械手在模外置物的位置必须要在原点和中置点位置之间。福建自动化机器人供应厂