南京玥力机械有限公司于2017年08月09日成立。法定代表人赵岩。
其他的EOAT选择包括翻盖式抓手,它能将一个袋子或者其他包装形式的两边夹住;叉子式抓手,它插入包装的底部来将包装提升起来;还有袋子式抓手,这是翻盖式和叉子式抓手的混合体,它的叉子部分能包裹住包装的底部和两边。
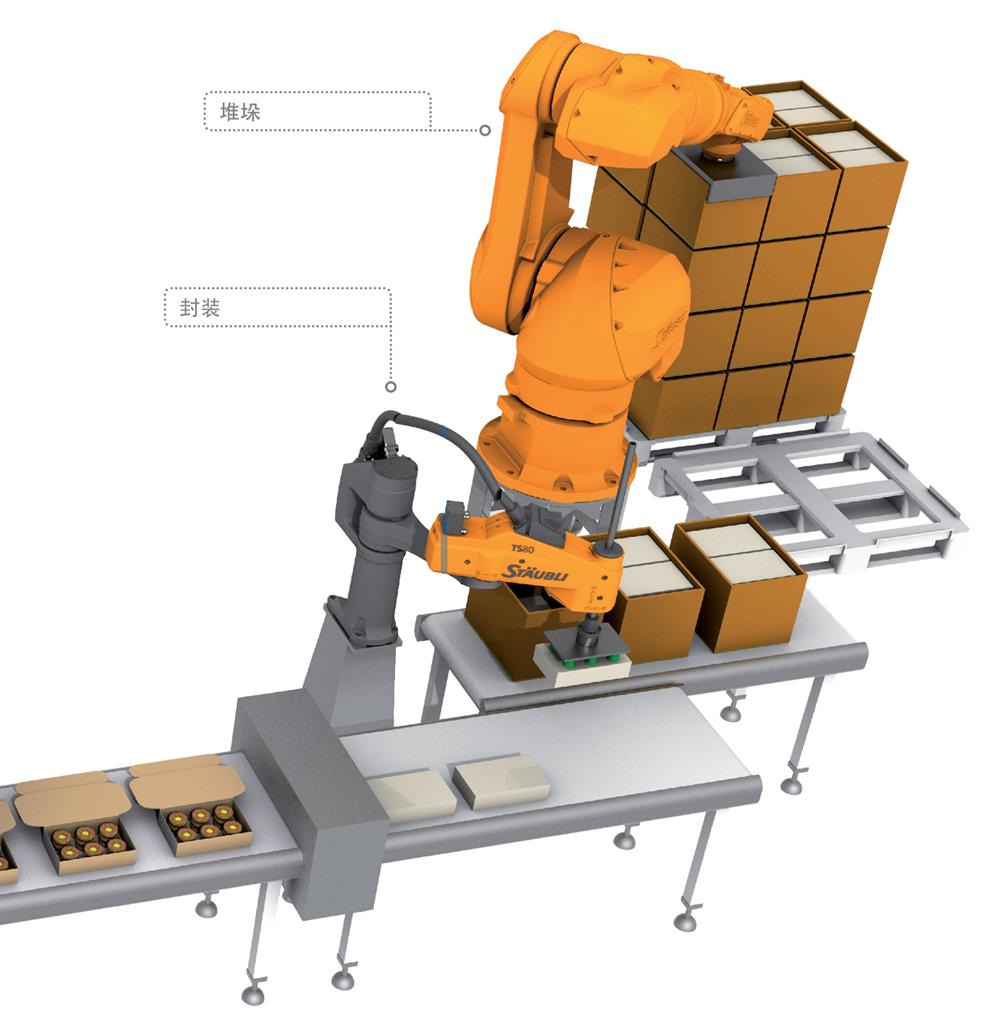
码垛机器人工作原理
平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。上方挡料杆下降,另三方定位挡杆起动夹紧,此时平板复位。各工件下降到栈板平面,栈板平面与平板底面相距10,栈板下降一个工件高度。往复上述直到栈板堆码达到设定要求。码垛机器人配备有定制设计的多功能抓取器,不管包装箱尺寸或重量如何,机器人都可以使用真空吸盘牢固地夹持和传送包装箱。
码垛机器人有很多不同规格的产品,从低到高速品种很多,所以选择范围也非常的广泛。
码垛机器人在冰冻环境下,自动化的随机存取式码垛机并不是正确选择,因为大多数自动化随机存取码垛机都使用在冷库里会结冰的压缩空气管。而与自动化码垛机相比,码垛机器人的尺寸更紧凑,由于冷冻仓库中的空间十分宝贵,因此这点显得尤为重要。尽管如此,机器人在冷冻仓库中的应用也存在着一些问题。一些供应商开始为冷冻仓库设计的码垛机器人。
南京玥力机械有限公司聘请的大都具有10-20年行业使用,研发经验的精英人才,从的角度为客户提供方案,满足客户的多种需求,销售的产品也得到了广大客户的认可和支持。