价格:180000起
东莞市正信激光科技有限公司
联系人:佘家强
电话:+8618681098755
地址:竹塘村环村路170号汇鸿工业园A栋2楼
激光焊接
激光的物理原理在20世纪初的时候已经由爱因斯坦阐述清楚,然而,**台激光器直到1960年才由hughes研究所在malibu研制成功。
四年之后,世界上**台nd:yag固体激光器和co2气体激光器就被研制出来,直到今天,这两种激光器还是全世界应用较广泛的两种工业激光器。而在较近几年,新的激光技术比如光纤激光器和碟片激光器不断涌现。全世界**个用于大规模工业生产的激光焊接一直到20年后的1984年才出现。
今天,激光焊接在各个工业行业已经得到广泛应用。激光焊接以外,激光钎焊,激光冷/热送丝焊接和激光复合焊接也大大拓展了激光的应用领域。
由于其*特的柔性和生产效率,激光加工已经成为各个生产环节中的*特的工艺。
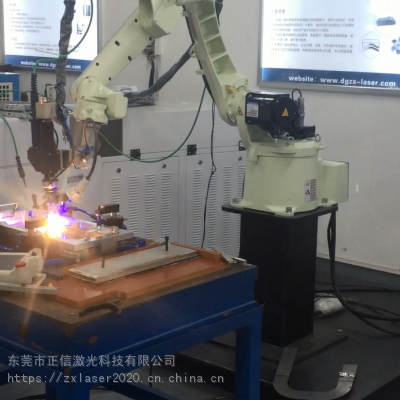
正信的机器人激光焊接系统
正信的机器人激光焊接系统型号为zxlaserrobot基于一个6轴机器人,具有非常高的灵活性,可以完成复杂工件的加工,而且能够适应工件多变的情况。
机器人焊接系统由以下几个部分构成:kuka(abb 川崎 松下)机器人,工作台,吸尘器,激光光源和冷水机。对于激光光源而言,脉冲激光器,二极管激光器,光纤激光器和碟片激光器都可以与机器人系统相连。
正信机器人激光焊接系统所用的机器人kukakr30ha的重复精度为+/-0.05mm,名字中的ha代表“高精度”。激光系统可以使用焊接镜头,切割镜头,扫描焊接镜头甚至激光熔覆头,由于采用的是磁力耦合的连接方式,所以不同镜头之间可以相互快速切换。机器人的负重能力是30kg,可以带动镜头中2000×1000×700mm范围内移动。对于扫描焊接而言,由于镜头重量更大,必须选用负重量100kg的机器人系统。
该系统配置有ccd摄像头,可以清楚的观察到加工过程。
同时,该系统可以配置”teachline”功能,通过光学传感器来探测焊缝的实际位置,从而对工件的公差和定位误差实现自动校准。通过“teachline”功能,可以大大减少重新示教所需要的大量时间。焊接辅助气体通过可以更换的不同型号的气体喷嘴,将焊接气体送到工件表面。同时,“crossjet”侧吹气幕,通过水平方向上的高压空气从细缝吹出,形成一道气体屏障,降低焊接飞溅弄脏镜头的保护玻璃的风险。该机器人系统的主要功能是实现无焊丝的激光焊接,从而实现激光高速焊接的优势。当然,该系统也可以很好的使用冷送丝焊接功能,适用于在接头缝隙过大的情况下,或者对于焊接区域金相微结构有特殊要求的情况。
按照不同的应用要求,该系统可以配置工件变位器。典型的工件变位器由旋转-翻转轴构成,这两个轴构成机器人的*七和*八个外部轴,可以实现与机器人的完全联动,从而使得焊接复杂工件变得简单,增大焊接区域的可达性。为了进一步提升焊接效率,该机器人系统还可以配置双工作台的结构,使得激光焊接在内部的工作台进行的时候,工件的装夹可以在外部工作台进行,在大批量焊接的情况下,这种双工作台的方式尤其有利。而对于工件形状比较复杂,数量较少的情况,则比较合适使用工件变位器配合加工。